北理工代表隊獲IEEE ITSC自主泊車全球挑戰賽冠軍
發布日期:2022-10-24 供稿:機械與車輛學院 攝影:機械與車輛學院
編輯:劉超凡 審核:席軍強、倪俊 閱讀次數:
9月18日,第25屆IEEE智能交通系統國際會議(IEEE International Conference on Intelligent Transportation Systems,簡稱IEEE ITSC 2022)在北京開幕。大會設立自主泊車軌跡規劃全球挑戰賽(Trajectory Planning Competition for Automated Parking,TPCAP)。北京理工大學機械與車輛學院汽車研究所郭子雋博士、于會龍教授、席軍強教授團隊獲得挑戰賽第一名。
IEEE ITSC是智能交通領域最高水平的會議,由IEEE ITS協會每年舉辦一次,從1997年到2021年已舉辦24屆。會議涉及人工智能、交通、電子、通信、控制和計算機等專業,集中反映了當前關注的核心問題及未來的發展方向,代表了國際智能交通領域的最高水平和最新進展,是智能交通領域重要的科學盛會。

TPCAP是一項聚焦于泊車場景自動駕駛車輛軌跡規劃技術的全球線上比賽。該賽事依托第25屆IEEE智能交通系統國際會議(IEEE ITSC 2022)舉辦,由湖南大學、青島智能產業技術研究院、中國科學院自動化所、清華大學等單位組織承辦。賽事為業界與學術界研究人員提供交流平臺,促進自主泊車軌跡規劃技術的發展,引領高質量車載決策規劃系統開發的技術潮流。TPCAP自2022年6月上線以來,在全球范圍內累計吸引了來自24家高校、研究機構、企業的61支參賽隊伍,參賽單位包括麻省理工大學、加利福尼亞大學(伯克利分校)、路易斯安那州立大學、清華大學、北京理工大學、上海交通大學、浙江大學、復旦大學等國內外知名高校,以及上海浦江國家實驗室、滴滴出行等科研院所和企業。
參加TPCAP決賽的隊伍從初賽成績較好的隊伍中選出,在3個月內成功得到全部20道賽題可行解的23支隊伍(來自國內外16個單位)被邀請參加決賽。決賽題目于10月10日公布,比賽時間限定為24小時,且各參賽隊只有一次提交結果的機會。最終,經過組委會打分系統的評價,北京理工大學代表隊奪得挑戰賽冠軍。
該團隊長期致力于研究復雜環境下無人駕駛預測、決策、規劃與控制理論及技術,在無人駕駛智能決策、最優控制等領域有著扎實的研究基礎。在本次挑戰賽中,該團隊設計了從粗搜索到精細優化的自主泊車軌跡規劃算法流程,在初賽與決賽中有效解決了若干困難賽題。
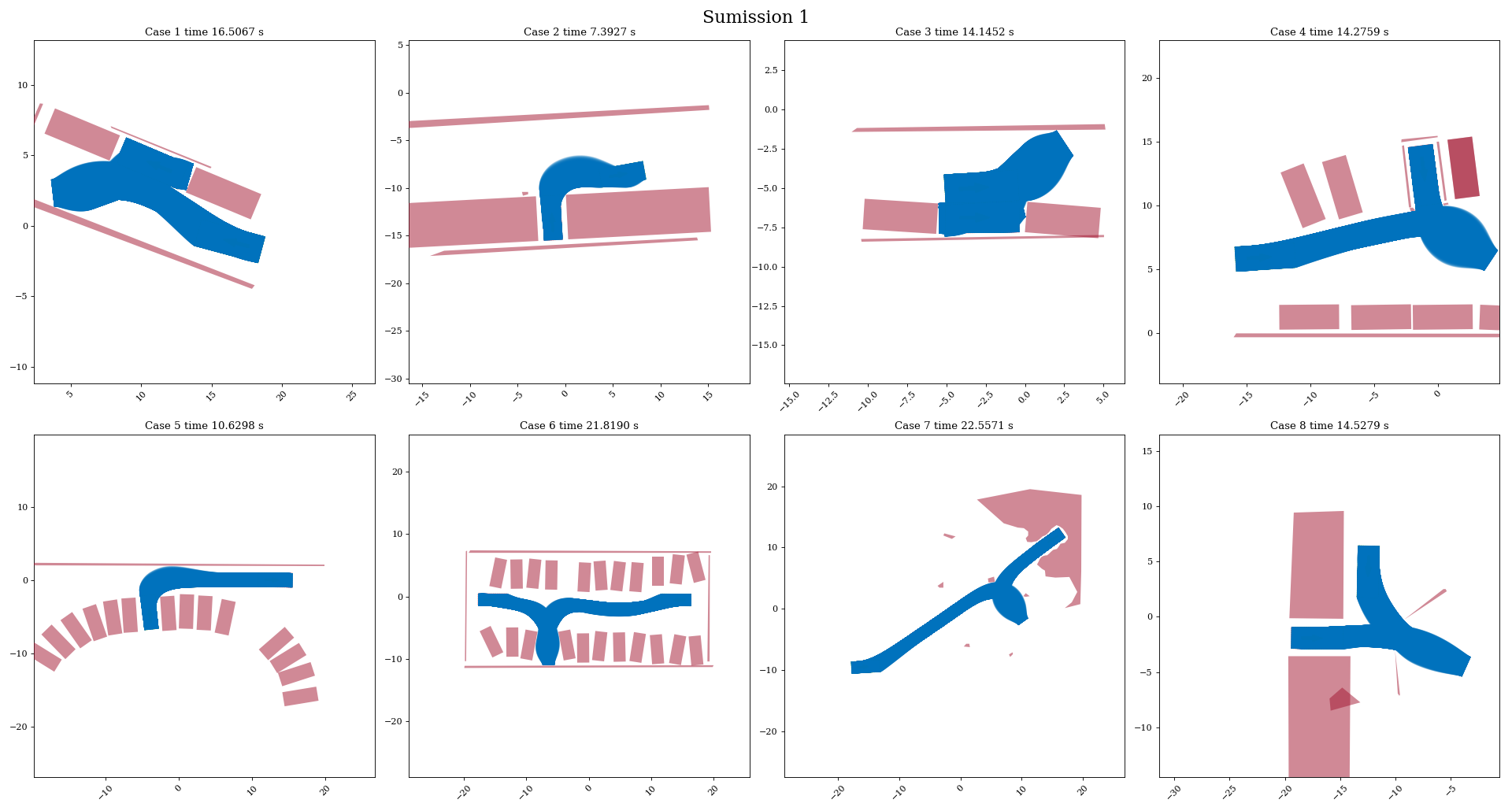
團隊在決賽提交的泊車軌跡
10月11日晚,TPCAP組委會組織了線上頒獎典禮以及技術研討會。在研討會中,包括北京理工大學代表隊在內的12支決賽隊伍進行了技術分享。





